Foveon Quattroセンサーが4:1:1でも成立する理由ですが、
山木社長のプレゼンを見て、おぼろげながら分かってきた気がします。
今までのFoveonセンサーが B / G / R が 4:4:4 という定義だったのに対して、
今度のFoveonセンサーは、B(Y) / Cg / Cr …いわゆる色差センサーということなのではないでしょうか。いや、今までも分光特性からすれば、色差演算せざるを得なかったと思いますが…
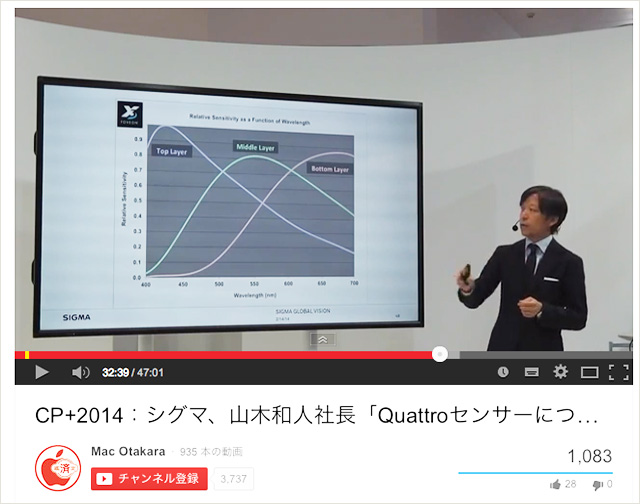
@danbo氏公開の山木社長のプレゼン動画より
その証拠に、今回は「B / G / R層」と言わずに、「Top / Middle / Bottom Layer」と言っています。
この特性で「Top Layer を Y(輝度)としても使う」と腹を括ったのであれば、
R(x,y) = Top(x,y) + α Bottom(2x,2y)
G(x,y) = Top(x,y) – β Middle(2x,2y) – γ Top(x,y)
B(x,y) = Top(x,y)
深く考えずに式を書いてみたので一例ですけど、たとえば(ほんとうにたとえば、です)上記のような YCbCr → RGB 変換式により、確かに Top Layerの解像度に近い、R/G/B信号が得られます。
ただ、それでもやはり、Middle / BottomがTopと同じ解像度があった場合の方が、画質は上がると思いますが…。
この方式でもモアレが発生しないのは、色を演算する上での「重心」が各色でズレていないためと思われます。ベイヤー配列ですとたとえば「赤や青しか受光していない画素の緑成分」はどうしても演算で求める必要があり、その演算誤差が色モアレとなって見えるわけですが、Foveon Quattroセンサーの場合は「RもGもBも受光していない画素」は存在しないので、色モアレは限りなく少なくなるわけです。
…という考えで、どうでしょうか(笑
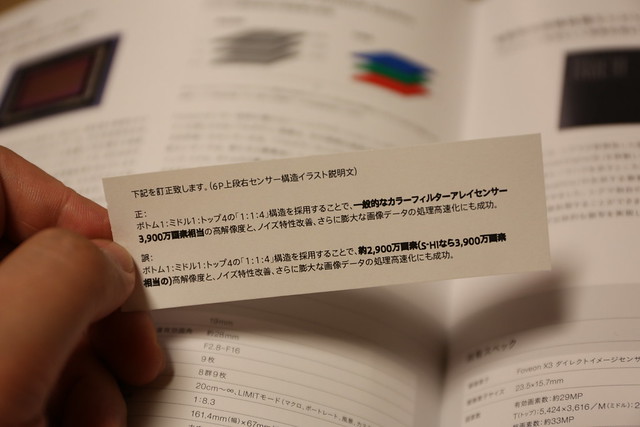
会場で配布されていたカタログにはこんな訂正表が。
解像度をどう謳うか、試行錯誤した形跡が窺える…かも知れません。
—
SIGMA デジタルカメラ DP2Merrill 4600万画素 FoveonX3ダイレクトイメージセンサー F2.8(Amazon)
コメント
今までのFoveonでも、第1層でYを撮り第2・3層で色差を撮っていたのは同じです。
そして、第2・3層は微弱で、ノイズが多かったらしいです。
第1層のYで解像度を稼ぎ、第2・3層を大きくする事で色ノイズ減を狙っている物と推測します。
人間は輝度解像度強く、色解像度には弱いです。
JPEGでもY:Cr:Cb=4:1:1として、色解像度を落としてますが通常は気づかれません。
しかしその「通常は気づかれ」ないことを愚直にやることで
同社が今のポジションを築いたはずなんですけどね…。